The CM Labs team is pleased to announce the latest release of Vortex Studio. This version focuses on improvements to ease of use as well as ease of licence deployment. Here are the highlights:
It’s now easier to design, inspect, and modify mechanisms
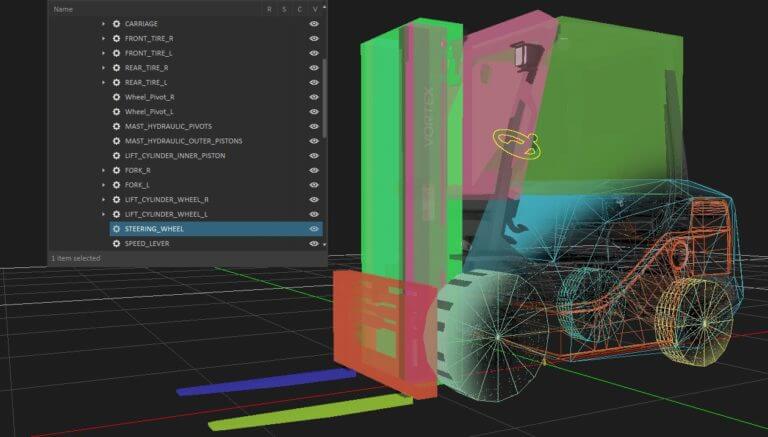
Mechanism parts are now individually colorized based on their geometries, so you can easily preview and select them in complex assemblies.
Performing licence diagnostics and activation is simpler
The Vortex License Manager application can now detect simulators on the network and report the status of their licenses in a dedicated view, making it easy to diagnose and troubleshoot any licencing issues. Additionally, the Vortex Activate (5 nodes) package can be enabled from a single computer to automatically license all nodes of your prototype simulator. Vortex Director no longer requires a license, as it is now used as the main application for installing and updating distributed simulators.
Remote debugging is easier
We’ve expanded the available parameters for remote debugger connectivity to deployed simulators, to improve ease of use for integrators and mechanical engineers.
USB device support has been improved
With new automatic detection and USB port assignment, we’ve simplified the integration of a broad range of off-the-shelf devices supporting the Windows DirectInput protocol. You can reduce overall simulator cost by providing end users with options for easy-to-use devices such as joysticks and steering wheels with force feedback.
Multi-monitor rendering synchronisation issues have been addressed
We’ve addressed several synchronization issues that were affecting graphical rendering in the case of multiple machines or monitors. This issue particularly affected rotating points of view (such as the operator view in the cabin of some construction equipment). Operators who are driving equipment for long periods of time will experience less fatigue, while benefiting from a more fluid and immersive simulation.
Other enhancements in this release of Vortex Studio include new Earthworks System support in the Epic Unreal integration, as well as a tech preview of a depth sensor that can be attached to a mechanism for automation purposes. For full release notes, click here