Improving the SSM Technique
The most significant challenge we had to overcome was the SSM’s fluid-like appearance—fine for water, but not so great with soil. There is a simple reason why SSM is never seen with anything other than a single color; there is no way to map textures on it; the mesh is in screen space, and depth data alone is not enough to position the texture image on the mesh.
The naive approach to solving this was to generate UVs based on the gl_Position shader variable, which contains the position of the pixels on the screen. However, since these positions are in view space, we saw an effect we call “texture swimming,” where the texture ended up following the camera.
To generate world space UV data (data independent from the rotation and position of the camera), we generated a second buffer, along with the depth buffer, to save the UVs of the particles. Since the physics engine does not modify rotations of the particles (for faster performance), we also randomly seeded the UVs associated with each particle to break visual patterns. To simplify and expedite UV generation, particles were converted to something similar to sphere-shaped billboards so that computing depths, normals, and UVs were only simple texture fetches.
At this point, we had to choose whether to generate the normals using the depth buffer or use those of the particles (through yet another buffer). Generating the normals led to some excellent results for fluidic materials. Therefore it was decided to use the particles’ normals instead.
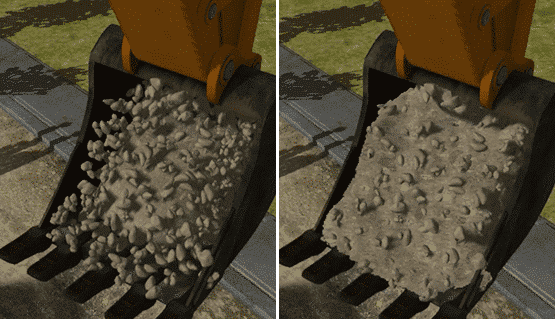
For seamless rendering of soil and rock, we combined mesh instancing and SSM. These instanced meshes were randomly selected original particles used to generate the SSM’s input depth buffer. This allowed us to apply one material per particle geometry instead of one global material for all geometry in the Soil Particles extension. This means that we can, for example, now render rocks into loamy soil.
Optimizing with a Distance-Dependent Blur
Another issue with using the SSM effect is its view dependence. Because of how blurring works, the camera’s distance from the mesh greatly affects the amount of blur that is applied to it. This artifact is not as obvious when using transparent materials (such as water) but, in our case, it became very obvious because we are dealing exclusively with opaque materials.
Our solution was to use a view-dependent kernel which blurs less as the camera is moved away. This is computed using the view distance, screen resolution, and near and far values. Since those values do not change much (in our case), we simply hardcoded values that made sense for us instead of making the blurring steps even more computationally expensive and complex.