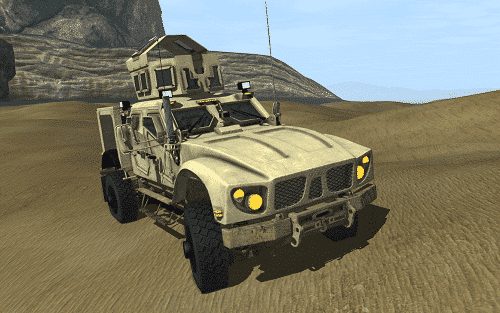
The mechanisms use the latest Vehicle Systems features: transition time between the gears, maximum torque on differential locks, and minimum and maximum travel of the suspension. Both LAV and M-ATV include tire models for hard and soft surfaces, and the M-ATV includes a simple central tire inflation system (CTIS) as well. The turrets on the LAV and M1A2 can be controlled via the D-pad. It’s possible to “fire” the main gun with blanks (no projectile is actually launched). A Python script directs the turret’s motions using switch inputs, since the turret is controlled from the digital D-Pad instead of an analog joystick. Another script applies forces similar to the ones generated when firing the gun, so you can feel the recoil while driving. All components of the sample incorporate the multi-texturing feature, with heavy use of masks and layers to create seamless materials. The LAV has textures for different levels of dirt and mud, which are linked to the odometer via a script. By changing the transparency of the top layers, we can make the vehicle gradually get dirtier the longer it travels over mud or sand. If we look at the scene itself, it includes several different starting points for the simulation via the Configurations feature. This allows you to start a selected model directly in front of an interesting obstacle, rather than having to drive over. Some of the mechanisms have configurations as well: for example, you can drive a lighter, turret-less variant of the LAV. The sample includes a number of Python scripts that can be easily re-used on other vehicle models. Some provide control over the various transmission sub-systems, while others are used for the user interface (to display speed and RPM, for example). There are also some scripts to provide very specialized functions, like the “Spring Compression Display Logic” script used to visually compress the springs in the suspension of the M-ATV. All of these can be found in the various vehicle mechanisms, usually in the folder labelled “Scripts.”